
Relevant publications
Dr. Amit Boyarski
Data-driven modeling of interrelated dynamical systems
Non-linear dynamical systems describe numerous real-world phenomena, ranging from the weather, to financial markets and disease progression. Individual systems may share substantial common information, for example patients’ anatomy. Lately, deep-learning has emerged as a leading method for data-driven modeling of non-linear dynamical systems. Yet, despite recent breakthroughs, prior works largely ignored the existence of shared information between different systems. However, such cases are quite common, for example, in medicine: we may wish to have a patient-specific model for some disease, but the data collected from a single patient is usually too small to train a deep-learning model. Hence, we must properly utilize data gathered from other patients. Here, we explicitly consider such cases by jointly modeling multiple systems. We show that the current single-system models consistently fail when trying to learn simultaneously from multiple systems. We suggest a framework for jointly approximating the Koopman operators of multiple systems, while intrinsically exploiting common information. We demonstrate how we can adapt to a new system using order-of-magnitude less new data and show the superiority of our model over competing methods, in terms of both forecasting ability and statistical fidelity, across chaotic, cardiac, and climate systems.
Spectral subgraph localization

Several graph analysis problems are based on some variant of subgraph isomorphism: Given two graphs, G and Q, does G contain a subgraph isomorphic to Q? As this problem is NP-complete, past work usually avoids addressing it explicitly. In this paper, we propose a method that localizes, i.e., finds the best-match position of, Q in G, by aligning their Laplacian spectra and enhance its stability via bagging strategies; we relegate the finding of an exact node correspondence from Q to G to a subsequent and separate graph alignment task. We demonstrate that our localization strategy outperforms a baseline based on the state-of-the-art method for graph alignment in terms of accuracy on real graphs and scales to hundreds of nodes as no other method does.
Spectral geometric matrix completion
Deep Matrix Factorization (DMF) is an emerging approach to the problem of reconstructing a matrix from a subset of its entries. Recent works have established that gradient descent applied to a DMF model induces an implicit regularization on the rank of the recovered matrix. Despite these promising theoretical results, empirical evaluation of vanilla DMF on real benchmarks exhibits poor reconstructions which we attribute to the extremely low number of samples available. We propose an explicit spectral regularization scheme that is able to make DMF models competitive on real benchmarks, while still maintaining the implicit regularization induced by gradient descent, thus enjoying the best of both worlds.
Deep matrix factorization with spectral geometric regularization
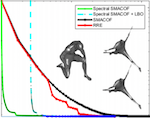
We address the problem of reconstructing a matrix from a subset of its entries. Current methods, branded as geometric matrix completion, augment classical rank regularization techniques by incorporating geometric information into the solution. This information is usually provided as graphs encoding relations between rows/columns. In this work, we propose a simple spectral approach for solving the matrix completion problem, via the framework of functional maps. We introduce the zoomout loss, a multiresolution spectral geometric loss inspired by recent advances in shape correspondence, whose minimization leads to state-of-the-art results on various recommender systems datasets. Surprisingly, for some datasets, we were able to achieve comparable results even without incorporating geometric information. This puts into question both the quality of such information and current methods’ ability to use it in a meaningful and efficient way.
Code is available either as Google Colab notebook, or via https://github.com/amitboy/SGMC
Shape Correspondence with Isometric and Non-Isometric Deformations
The registration of surfaces with non-rigid deformation, especially non-isometric deformations, is a challenging problem. When applying such techniques to real scans, the problem is compounded by topological and geometric inconsistencies between shapes. In this paper, we capture a benchmark dataset of scanned 3D shapes undergoing various controlled deformations (articulating, bending, stretching and topologically changing), along with ground truth correspondences. With the aid of this tiered benchmark of increasingly challenging real scans, we explore this problem and investigate how robust current state-of-the-art methods perform in different challenging registration and correspondence scenarios. We discover that changes in topology is a challenging problem for some methods and that machine learning-based approaches prove to be more capable of handling non-isometric deformations on shapes that are moderately similar to the training set.
Multidimensional scaling
The various multidimensional scaling models can be broadly classified into metric vs. non-metric, and strain (classical scaling) vs. stress (distance scaling) based MDS models. In metric MDS the goal is to maintain the distances in the embedding space as close as possible to the given dissimilarities, while in nonmetric MDS only the order relations between the dissimilarities are important. Strain-based MDS is an algebraic version of the problem that can be solved by eigenvalue decomposition. Stress-based MDS uses a geometric distortion criterion which results in a non-linear and non-convex optimization problem. Each of these models has its own merits and drawbacks, both numerically and application-wise. On top of these basic models, there exist numerous generalizations, including embedding into non-Euclidean domains, working with different stress models, working in different subspaces, and incorporating machine learning approaches to obtain faster, more accurate and more robust embeddings. This chapter reviews these models, with emphasis on their role in computer vision applications.
Efficient deformable shape correspondence via kernel matching

We present a method to match three dimensional shapes under non-isometric deformations, topology changes and partiality. We formulate the problem as matching between a set of pair-wise and point-wise descriptors, imposing a continuity prior on the mapping, and propose a projected descent optimization procedure inspired by difference of convex functions (DC) programming. Surprisingly, in spite of the highly non-convex nature of the resulting quadratic assignment problem, our method converges to a semantically meaningful and continuous mapping in most of our experiments, and scales well. We provide preliminary theoretical analysis and several interpretations of the method.
Subspace least squares multidimensional scaling
Multidimensional Scaling (MDS) is one of the most popular methods for dimensionality reduction and visualization of high dimensional data. Apart from these tasks, it also found applications in the field of geometry processing for the analysis and reconstruction of non-rigid shapes. In this regard, MDS can be thought of as a shape from metric algorithm, consisting of finding a configuration of points in the Euclidean space that realize, as isometrically as possible, some given distance structure. In the present work we cast the least squares variant of MDS (LS-MDS) in the spectral domain. This uncovers a multiresolution property of distance scaling which speeds up the optimization by a significant amount, while producing comparable, and sometimes even better, embeddings.